I thought I’d put a post together summarizing some of my robots as I prepare to archive and rebuild ScottsBots.Com.
TetherBot – 1999
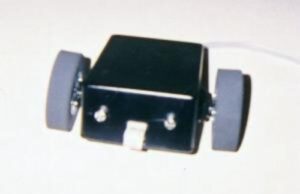
I built this robot in 1999. I hacked two hobby servers (Futaba 3003) to make it move and built my own sensors with some parts from Radio Shack. To move this robot I connected an ethernet cable to the parallel port on my Windows 98 Machine.
Baby Joe – 2001
This was my second and third robot. I reused the hacked servo motors from TetherBot, but this time I used a Basic Stamp microcontroller to control the IR sensors and send PWM signals to the servo motors. I also used Aluminum and plexiglass as construction materials.
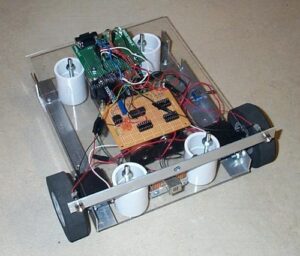
Rovey – 2002
I started to experiment with different chassis materials (this time PVC). Also because I had more servos (pan/tilt) webcam and 2 drive servos (same ones) I upgraded the controller from a Basic Stamp 2 to a Scott Edwards Mini-SSC. This device allowed me to send commands to the servos with 3 bytes (255, servo(0-7), position (0-255). So (255,0,127) would send a stop/neutral pulse to servo connected to the 0 pin. (255,0,0) would send full clockwise pulse to the servo on pin 0. (255,0,255) would send a full counter clockwise pulse to the servo on pin 0. This is a great little board and one I use to this day on some of my new robots.

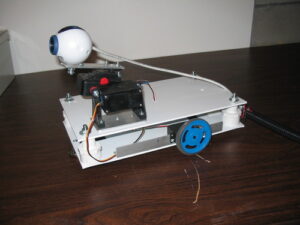
I created this robot for a talk at COSI. The idea was that students could login and control the robot from a web browser. The idea of the talk was to connect with Mars Pathfinder robot which at the time was discovering it’s way around Mars. The photo isn’t great I tried to create a Martian landscape and added rocks for the robot to explore. The robot was tethered so it could have continuous power, but to prevent the robot from getting tangled I connected the robot wires to a string hung from the ceiling.